















John Deere 944k Hybrid Wheel Loader

(Images courtesy of John Deere)
Peter Donaldson reports on the design and development of this bulk material mover, the first in its class to become commercially available.
Get a load of this
In construction and mining, wheel loaders move material in bulk, often scooping it from piles with a bucket and then lifting and dumping it into a truck or crusher. Most are powered by diesel engines coupled to mechanical transmissions, but the unique operating requirements and work cycle of a loader make it particularly suited to series diesel electric hybrid propulsion with regenerative braking, even without the need to store electrical energy. This, and the productivity improvements it allows, are what led John Deere to develop the first commercially available hybrid wheel loader in its class, its 56.5 tonne production-class 944K, which has a 10 cubic yard bucket.

Hybrid-ready load cycle
The load cycle of such vehicles is quite variable, and there are subtleties that suit it to this type of hybrid propulsion.
As John Deere’s drivetrain product planning manager Darren Almond explains, with a mechanical transmission driven through a torque converter, when the vehicle pushes into the pile, the torque converter starts to slip, generating heat and slowing the engine down to the point where there’s a risk of stalling. Also, the hydraulic pump’s speed is directly related to the engine speed, and if the engine lugs, the fluid flow will decrease at the very moment the driver wants to start lifting the bucket.
With a series electric hybrid propulsion system, there is no direct mechanical connection between the engine and the wheels, which is a major advantage. “The engine is able to run at a constant speed, and the more efficient drivetrain pulls only enough power from the engine to supply the traction load,” Almond says.

Driving into the pile requires very high torque at the wheels at low speed, he explains, and the generator experiences an increase in load, but the engine control adds more fuel to maintain engine speed while matching the torque demand. All the while, the hydraulic system is running with constant capability.
That simplifies the task for the operator, Almond says, who just has to drive into the pile and pull the lever to raise the bucket. “That’s where the productivity from an operator comes in. You don’t need to have somebody who is really an expert at controlling the machine and managing the engine speed to get the hydraulics to perform the way they should,” he adds.
When driving into the pile, the loader effectively uses its massive inertia and excellent low-speed torque capabilities of its traction motor to fill the bucket. Regenerative braking automatically occurs whenever the vehicle has to slow down or change direction, such as when it approaches a truck or crusher, often raising the bucket at the same time. As the regenerative braking system comes on, the recovered energy is immediately used to supply power to the hydraulic system and other engine-connected loads.
“There are several regenerative braking opportunities within each loader work cycle, and there is often simultaneous significant hydraulic load associated with the boom and bucket as well as with the steering cylinders on an articulated vehicle,” Almond says. “That is where you can take the load off the engine and really have the energy from the motors fed back through the system to the hydraulics.”
Brake resistors
However, there are situations where the regenerative braking will produce more power than the system can immediately use, but the operator or owner still wants to minimise wear and tear on the mechanical brakes, which the vehicle retains for redundancy. If, for example, the loader is taken down a steep gradient while little use is being made of the hydraulics, there will be excess power coming from the traction motors operating in generator mode to control the vehicle’s speed down the slope.
If there is nowhere for it to be used or stored, this excess electrical power must be dissipated somehow, which is the job of the brake resistors. Essentially resistive elements that convert electrical energy to heat, in the same way as a domestic electric water heater, the brake resistors are plumbed into the engine’s cooling system so that the excess energy leaves the vehicle via the radiator.
Hybrid drivetrain architecture
Decoupling the engine mechanically from the final drive system also enables the engine to operate at a sweet spot for the application, maximising its productivity and fuel economy while meeting ever-tightening emissions requirements. In addition to saving fuel and reducing emissions, this architecture allowed John Deere to use a smaller engine than would otherwise be needed for a loader in this class – an important factor in the decision to go ahead with the 944K’s development.
The efficiencies of electric drive meant that the largest engine the company makes was powerful enough for the job, so it was saved the expense of developing a new one or buying one from another manufacturer, which would have been necessary had it been developing a mechanically driven loader, says senior power electronics engineer Kent Wanner. He led the team that developed the power electronics for the loader’s hybrid drive system, and now talks us through the powertrain.
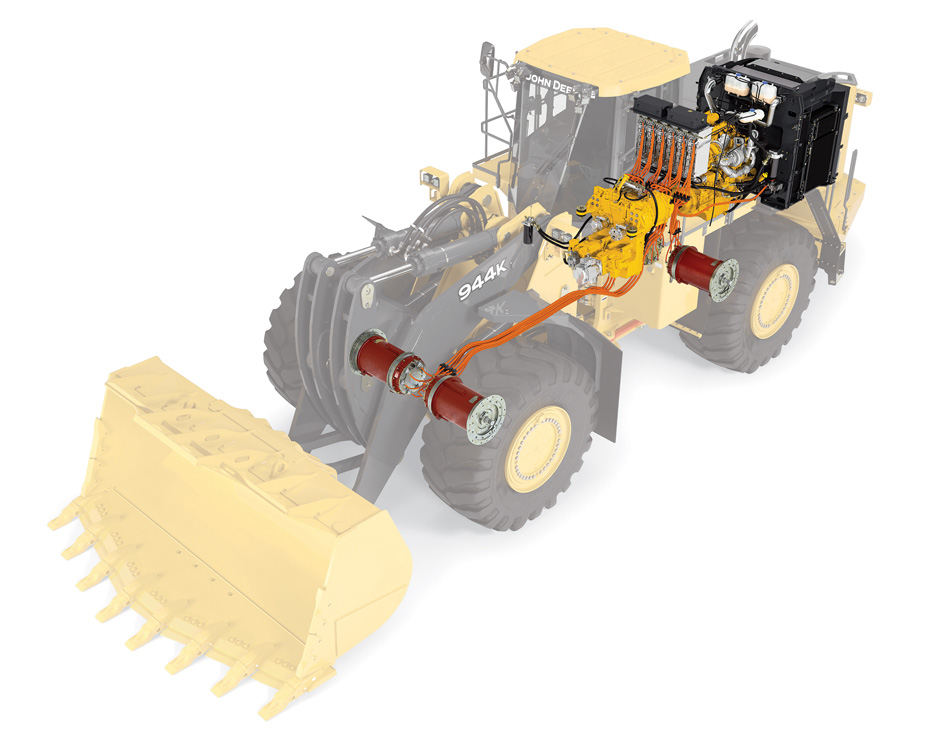
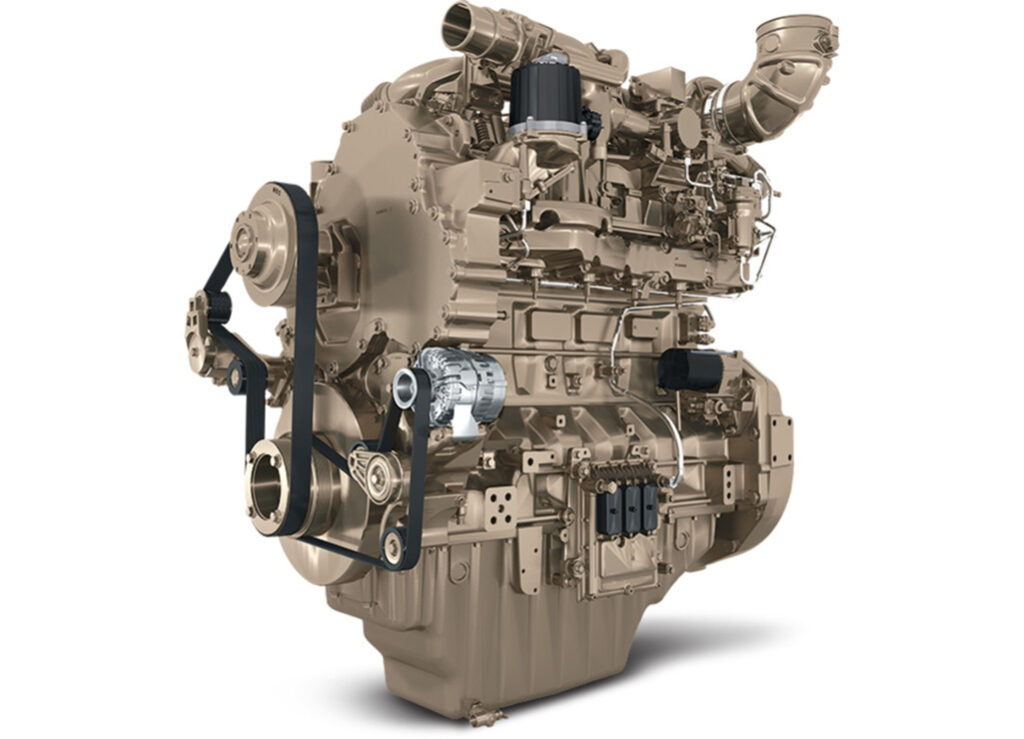
The prime mover, he explains, is the John Deere PowerTech PSS 6135, a 13.5 litre, six-cylinder, fourstroke turbocharged diesel with four valves per cylinder, which produces 400 kW (536 hp) at 1600 rpm and 2530 Nm (1866 lb-ft) of torque at 1400 rpm while meeting EPA Final Tier 4 and EU Stage IV emissions regulations.
“This smaller engine affords improvements, not only in fuel consumption but also in emitted acoustic noise,” Wanner says.
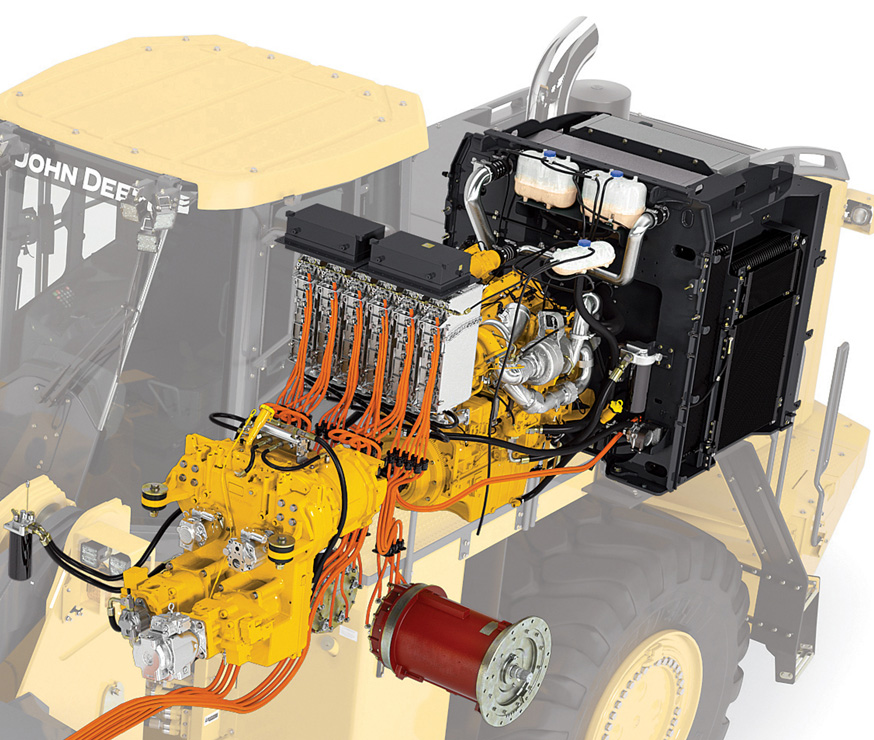
Hard-coupled to this engine (there being no clutch) is a John Deeredesigned gearbox that increases the rotational speeds at its outputs, driving a pair of brushless AC generators and the hydraulic pumps. “The torque on those generators is controlled by power electronics,” Wanner explains.
“We control the torque to make the required electrical power for the traction motors. The vehicle still has hydraulic steering, boom and bucket functions, as well as other systems that represent significant mechanical loadings on the engine.”
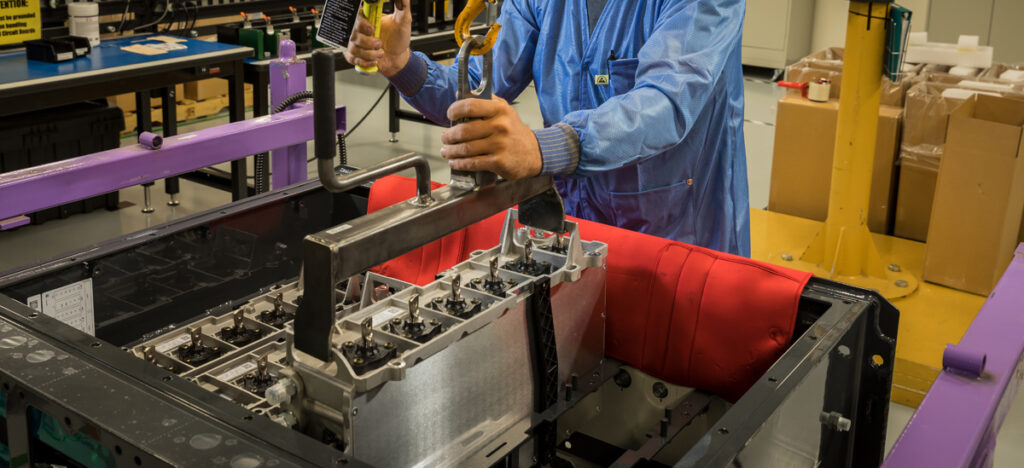
Inboard of each of the four wheels is a brushless AC traction motor that drives its individual wheel via a reduction gearbox. The traction drive’s electrical power is all contained within a power electronics cabinet containing six inverters – one for each of the electrical machines – which are solid-state devices based on silicon insulated gate bipolar transistor (IGBT) technology.
Conditioning the power
These inverters and their control electronics are at the heart of the 944K powertrain’s ability to flow power in either direction between the electrical machines, all of which can act as generators or motors.
During regenerative braking, when the electrical machines’ normal functionality is reversed, electrical power flows from the wheel motors, through the inverters, to the generators. From there, the generators function as motors and spin everything that’s mechanically coupled to the gearbox, including the engine and the hydraulic pumps.
Because the generators and traction motors differ in size and the speeds at which they run, the inverters must provide different waveforms suited to each one, based on the desired output.
“The voltage and frequency are not the same,” Wanner says. “Therefore, we have to convert from AC to DC, and then to a different AC waveform. Since the AC voltages and frequencies need to be completely independent of each other, we have a DC bus created by the power electronics in between.”
The DC interconnect bus includes a very capable and efficient capacitor, he says, the role of which is to smooth out the pulses in the current created by inverter switching as well as to help provide a very small buffer of energy during fast drivetrain transients.
The speed at which the 944K’s engine is run (user-selectable at 1200, 1500 or 1800 rpm) determines the generator speed via the fixed ratio of the gearbox, and the generator speed determines the natural voltage and frequency of the electricity that appears on the generator terminals.
“We have to go from zero speed to transport speeds on the motors, so you need to supply different voltages, currents and frequencies,” Wanner explains. “So we use power electronics [inverters] to transform power from the AC on the generator side into DC, then convert back to AC at the right frequencies and voltages to create the torque and speed we need for each motor.”

Proven IGBT inverters
While there is a lot of interest in the use of wide bandgap (WBG) power semiconductors such as silicon carbide (SiC) and gallium nitride (GaN) inverters, silicon IGBT technology is well-proven. “The reality is that, at these power levels and price point, those WBG technologies were not cost-effective or readily available when the 944K went into production.”
AC motors need current and voltage supplied to them that varies in a characteristic sine wave, which the inverters create using pulse width modulation. The IGBT circuits inside the inverters function as switches that turn on and off very rapidly – much faster than once per cycle of the sine wave – to create these pulses. Varying the duration of the pulses changes the voltage and therefore current in the electric machine.
This switching frequency is used to create an output that is reasonably close to the ideal sine wave – the fundamental frequency – for that motor, even though the output of an inverter takes the form of a square wave, with steep sides and a flat top.
“We take advantage of the fact that the motor is an inductive load,” Wanner says. “The inductance of the machine helps to average out the current, and you get quite a sinusoidal current even though you might be hitting it with a square wave, or varying square waves of voltage. The switching frequency is used to create a sine wave of current at a fundamental frequency that actually delivers torque.”
The fundamental AC frequency of a motor is determined by its rotational speed and the number of magnetic poles (the pole count) on the rotor. These can be created by the number of magnets in a permanent magnet electrical machine or the geometry of the rotor in other machine types such as induction, synchronous reluctance, switched reluctance and so on.
IGBTs are very good at handling the high currents and voltages used in the electric drive systems like that of the 944K, but the main trade-off is that they don’t switch very fast compared to WBG devices. Wanner says, “This is a relative term; we are still talking about low hundreds of nanoseconds for 1200 V IGBTs.”
High switching frequencies, coupled with high voltages and large currents, make solid-state inverters significant generators of heat from switching losses. When an IGBT switch turns on, for example, the voltage across it falls from what might be 700 V to zero almost instantaneously, while the current goes from zero to some number of amps, he explains.
“Those voltage and current waveforms are both transitioning, and during the transition time you will have voltage and current across the switch. That time may be a couple of hundred nanoseconds, and during that time there is both voltage and current.
“If you multiply volts by amps across that device, for that very short period of time there is a lot of power in them – hundreds of volts and hundreds of amps make tens of kilowatts or more during the transition,” he says.
“It’s not an ‘ideal’ switch though: the current and voltage ramp from off to on, and during those ramps you have switching loss. That matters, because that lost energy turns into heat, and the more times per second you do that, the hotter the device gets.”
Wanner says the inverter efficiencies are often in the “mid-to-upper 90s” in percentage terms, and that they provide their rated outputs at up to 70 C of coolant temperature. In the 944K, the inverters have their own dedicated cooling system with heat exchangers and pumps that pipe a water-glycol mix through the power electronics boxes in the cabinet.
The same switching losses are also the source of the radio frequency energy that can cause electromagnetic interference (EMI), so the cabling, cabinet, and inverter enclosures, as well as the electrical connections within them, must suppress EMI and shield components from it.
Inverter connectivity
As each inverter in the cabinet interfaces with its own electric machine, there is a one-to-one connection between the motors, generators and power electronics, and the inverters are interconnected on the DC side within the cabinet.
The wiring and connectors, Wanner notes, are part of the overall EMI design as well as the safety strategy that ensures, for example, that it is not possible for someone to come into contact with high voltages. “We have shielded cables and connectors, for one thing,” he says.
“All the high voltage is surrounded by a conductor that is at vehicle ground potential, so there is no way that anybody can ever touch any of the high-voltage signals. That helps to guard against high voltage and prevent EMI.”
Further, the power electronics interconnects can only be accessed by trained service technicians when the system is powered down, he adds.
Contrasting architectures
The 944K was designed from the ground up to be electrically driven, Wanner emphasises, contrasting it with the smaller 644K that is an electrified hybrid drivetrain version of a mechanically propelled loader that is still sold alongside it. A quick comparison of the two highlights the different constraints that applied in these two approaches, and illustrate the increased efficiency available with hybrids. While the conventional 644K loader has a 9 litre engine, the hybrid 644K uses a 6.8 litre engine to do the same job.
“The fuel economy is evident from that fact alone, but it also drives what you are going to do in selecting motors and generators, knowing that you’re going to drop the electrical machines as simply as possible into an existing vehicle architecture,” he says.
“With the 644K, we wanted to create a hybrid electric drivetrain option. We already had a transmission, differentials, axles and driveshafts, but we designed it to take a simplified transmission and a smaller engine. We have one generator and one traction motor feeding a simplified three-speed transmission, which has fewer gears and is much simpler than the one in the conventional vehicle.”

Robust, high-torque motors
For the 944K loader, the company didn’t face those existing ‘drop-in drivetrain option’ system constraints, so it chose a different architecture, with one motor driving each wheel via a single-speed gearbox.
“We don’t need to be shifting or clutching on these really high durability systems,” Wanner says. “We wanted motors that would give us a very wide constant power-to-speed ratio with which we can deliver full power from the traction motors over a very broad speed range, while being very durable for high torque outputs.
“Loaders spend a lot of time at very low speeds and very high torques, close to stall, trying to fill the bucket. We carefully selected a technology that could produce the high torques needed and the durability we required, while also having the ability to go all the way up to full transport speeds. We do not build the motors or generators but we were closely involved in their design to our specifications.”
Each traction motor is bolted to the vehicle’s chassis, towards the centre, and the output shaft of each goes into a single-speed planetary epicyclic reduction gearbox. The output of each gearbox then bolts to the inner wheel rim.
Although the 944K’s wheels spend much of their time at very low speeds, the motors spin much faster, up to about 4000-6000 rpm, implying the need for a large reduction ratio through each motor’s planetary epicyclic gearbox.
Almond emphasises that John Deere worked closely with suppliers to ensure that critical elements of the 944K’s motors, including the wiring and cooling, would be robust enough to meet the reliability and durability needs of this off-highway application. He stresses the importance of avoiding the pitfalls of transferring new electrification technologies from road vehicles into off-highway machinery, particularly with regard to reliability.
“There’s a lot happening in that space for passenger cars and even light-duty trucks in terms of motors, for example,” he says. “It’s tempting to think we’ll just take that motor off-road and make it work, plug it into a gearbox and all of a sudden we have an electrified off-road vehicle. However, the challenges regarding the durability and reliability requirements for off-road applications are orders of magnitude higher than a passenger car or even a bus or a truck.”
He adds that the stakes are also higher, as off-highway vehicles are revenue generators, and any failures with them can shut down entire work sites.
He also stresses that putting electric motors into mechanical systems is not simple. “There are a lot of dynamics involved that make it very challenging for somebody to just take an off-the-shelf motor and plug it into a spline on a gearbox and run something electrically,” he says.
“When you are dealing with motor speeds that can run anywhere from 4000 to 10,000 rpm in one direction, and then stop and accelerate rapidly to the same speed in the reverse direction, the dynamic loads on the geartrain are significant. So geartrain, bearing and cooling system design – as well as control – are all extremely critical in integrating an electric motor into a heavy-duty geartrain environment.”
With the 944K’s generators, the John Deere team knew they would be operating over a relatively narrow speed range, giving them the opportunity to optimise them to make power as efficiently as possible within that range.
All the electric machines and their associated gearboxes are cooled using hydraulic oil, which also lubricates the gearboxes.
Traction and rim-pull control
With independent motors for all four wheels on the 944K, John Deere had the new opportunity to manage the traction through the vehicle control system, to maximise productivity. Wanner says, “Now that we can provide whatever torque and speed we want at each motor, we can automatically detect wheel slip and do four-wheel traction control.
“The reality is that the amount of tractive effort on each wheel is changing very dynamically with soil conditions and loading of the vehicle. If the bucket is very full and you are trying to lift it, a lot of the weight is on the front two wheels and not as much on the back. The back wheels might therefore slip, or you might not have as much tractive effort at the rear at that point, so you need more at the front to compensate.
“With four-wheel independent traction control and the smart system controls, it enables us to deliver the power to the ground that maximises the productivity of the vehicle based on the conditions, and where the weight is, automatically compensating for the traction conditions of the soil at each tyre and so on.”
While the four-wheel independent traction control operates all the time, to get the maximum productivity from the vehicle the wheels must be allowed to slip to a degree, he points out.
On vehicles such as the 944K, with a 10 cubic yard bucket and heavy use, saving on tyre wear and tear is a significant part of the value proposition, Wanner says. “This architecture can make a meaningful difference by making those very expensive tyres last longer.”
While traction control is automatic, another tyre protection feature can be applied by the driver. This is rim-pull control, which allows the driver to set the amount of torque they want to allow to reach the tyres based on the conditions and the task.
If the driver judges that maximum torque is not required to complete the job, they can use the rim-pull control feature to limit it and thereby save wear and tear on the tyres and the rest of the drivetrain, Wanner explains. In slippery conditions it can help prevent tyre spin and slicing.
“Also, the owner of the equipment may want to set a rim-pull torque limit while a new operator gets up to speed for example,” he says.

Controller and software
Controlling all of this is an electronics architecture consisting of, at the highest level, a vehicle controller that interprets the driver’s inputs and commands individual controllers for the major subsystems.
These include the engine control unit (ECU), the advanced controller for the power electronics that serve as the drives for the generators and the traction motors. The system controller also coordinates the valving for the hydraulic steering, boom and bucket controls, most of which are produced in-house by John Deere Electronic Solutions.
“We design and manufacture our own engines and engine controllers,” says Wanner. “We also design and manufacture our own power electronics, as well as the vehicle electronics that connect to the two. The software is written within John Deere so that we can coordinate everything quickly and effectively, build on the strengths of all the components and avoid their weaknesses.
“We know where our engines operate best,” he adds. “We designed the rest of the system to leverage the strength of the engine and the engine controller. With the different levels of control, we are able to say, ‘Here is what the operator wants to do, and here are the limits of the subsystems.’”
One of the elegant features of applying this architecture and topology to this vehicle, Wanner adds, is that the well-integrated electrical system can automatically change operating quadrants on the electric machines between motoring and generating, and between positive and negative speeds.
“The fast and accurate control coordination between the systems allows the loader to seamlessly use and recover power while avoiding the need for electrical energy storage,” he says.

Operator interface
Although as a hybrid the 944K has new and less familiar components and technology than a mechanically driven loader, the computer-controlled power management system makes it simpler to operate, and the interface as seen from the driving seat is straightforward, Almond says.
There is no steering wheel, as it has been replaced by a joystick, which improves forward visibility from the cab as well as being physically much easier to manipulate.
Otherwise, control layout is very similar to other K-series wheel loaders. The main exception is the accelerator pedal, which controls vehicle speed and torque when the drive selector is in either the forward (F) or reverse (R) position – leaving engine speed to be controlled automatically according to the prescribed setting – but controls the engine speed when the drive selector is in the neutral (N) position.
This FNR drive selector is on the front of the joystick, while buttons with which the operator can shift between speed limits and select automatic speed control modes are on the top. From the operator’s perspective, this is akin to changing gear, although the 944K’s electric drive uses only one gear ratio between the motors and the wheels.
Two arrow buttons allow the operator to shift up and down between four speed ranges, each of which sets a maximum speed. For example, with the machine in the third speed range, it will only travel at up to 14.9 mph.
The third button on the top of the stick allows the operator to select either of the two automatic speed control settings: 1D and 2D. In 1D, the powertrain provides the highest level of torque at low speeds, while 2D limits the torque to the maximum available in the second of the speed ranges. Running in this setting is useful in applications that do not require all of the machine’s low-speed torque.

Integrated into the seat are a pair of levers that control the height of the boom and the angle of the bucket.
In addition to direct linear control of boom and bucket movement, the system also contains adjustable presets. Known as kick-outs, these include ‘return to dig’, which automatically lowers the bucket to where the operator wants it when pushing into the pile; ‘return-to-carry’, which puts boom and bucket at the right height and angle for carrying the load from the pile to the truck; and ‘boom height kick-out’, which puts the boom at the right height for dumping its load into a truck or hopper.
The bucket control lever also includes a quick-shift button that disengages the speed range functions, which the operator typically uses when approaching the pile, allowing the loader to slow down under regenerative breaking without the operator having to remove their foot from the accelerator. The button can also be used when the drive system is in the 2D setting to drop to the first (lowest) speed range if the operator needs more torque at the wheels.
To the right of the seat is a sealed switch pad that enables the driver to set those and other parameters, such as the engine speed range and drive system features such as coast control.
“This setting controls how aggressive you want the regenerative electric braking to be when you take your foot off the torque pedal,” Wanner says. “Once they have configured that, many operators can do a lot of work without using the mechanical brakes at all.”

Maintenance and durability
While offering reduced operator workload and increased productivity, these features also reduce wear and tear on the machine, contributing to a lower maintenance burden, the company says. Other than responding to any faults that the onboard diagnostics reveal, and annual vehicle inspections, the electric drive system needs little scheduled maintenance.
At around 18,000 hours, Almond says, some components such as the motors might need to be swapped from front to rear and from left to right, this being a method of evening out differences in work profiles and weight distribution in operation. Also, some of the power cables are expected to be renewed.
“These cables are consumables, albeit very long-period consumables,” he says. “The solid-state electronics and brushless motor technologies used are very robust and durable, resulting in less maintenance than their mechanical-drive counterparts. Using a narrower engine speed range also increases engine life,” he emphasises.
John Deere currently offers an eightyear/20,000-hour warranty for the electric powertrain components.
Future developments
Although the 944K was designed to operate without electrical energy storage, battery technology is steadily improving, and future upgrades and new vehicles in this size category could potentially consider including it.
This storage, says Almond, is likely to serve a supplemental role such as ‘peak shaving’ to reduce the load on the engine while accommodating peak power demand, perhaps ultimately allowing the use of an even smaller engine. Such a battery could store excess energy from regenerative braking that at present is dissipated by the brake resistors when no immediate use can be found for it.
Between them, the 944K loader and its smaller hybrid 644K sibling have logged more than 1,000,000 operating hours in the field.

Datasheet
Maximum operating weight: 56.524 tonnes
Height to top of cab: 4.2 mHood height: 3.13 m
Overall length, bucket on ground: 11.69 m
Wheelbase: 4.5 m
Height to hinge pin, fully raised: 5.35 mDump clearance, 45º full height: 3.88 m
Power plant: 400 kW six-cylinder, 3.5 litre turbodiesel
Generators: two brushless AC machines
Traction motors: four brushless AC machines
Power electronics: six solid-state IGBT inverters
ONLINE PARTNERS

