













Koenigsegg announces its first e-motor and EV drive unit

(Images courtesy of Koenigsegg)
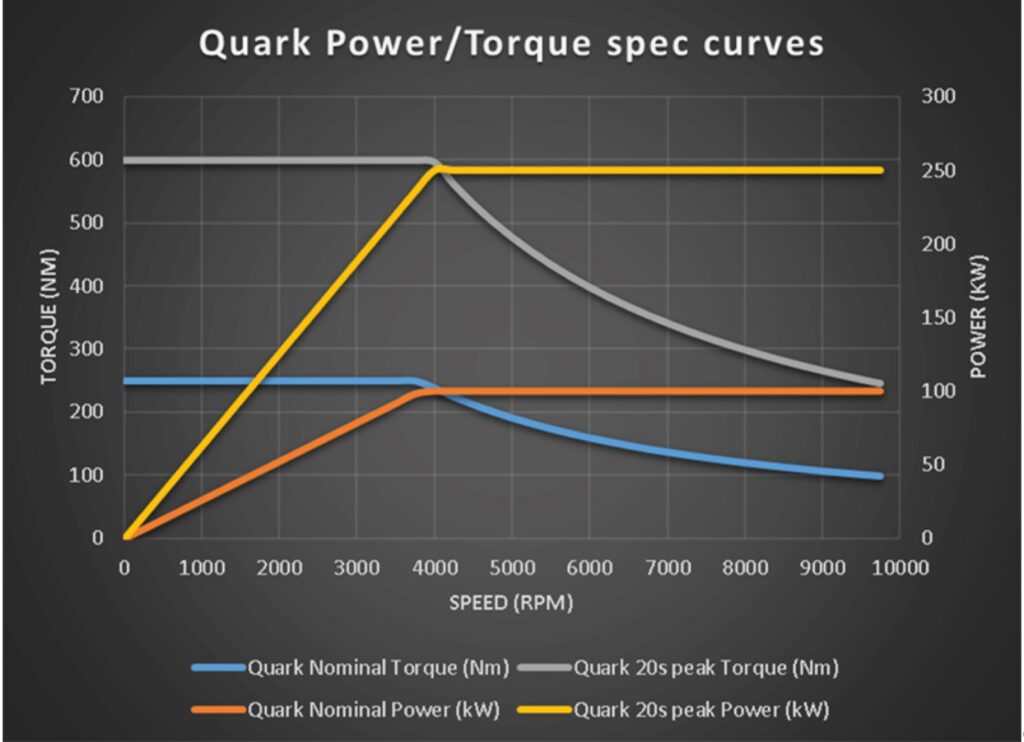
Koenigsegg has unveiled its first e-motor, the Quark, which uses a torque/power-rich balance between radial (power-dense) and axial (torque-dense) flux topology it calls Raxial Flux. The company has also integrated two of them with one of its David inverters, plus planetary gearsets, to create a torque-vectoring EV drive unit it calls the Terrier.
The company says a key driver for the Quark’s development was to continue its legacy with the Koenigsegg Gemera, but it is also intended for applications such as EV powertrains, aerospace, VTOL and marine craft, and more.
It adds that the motor is designed to bolster the low-speed range of the Gemera; its IC engine then focuses on the high-speed range.
The shaft in the Quark is made from 300M steel, as used in motorsport and aerospace. Direct cooling was chosen for its higher efficiency and compact design, and the rotor uses Koenigsegg’s Aircore hollow carbon fibre technology.
The first production version weighs 30 kg, produces up to 600 Nm of torque and 250 kW of power. Without the extra driveline functions for the Gemera, the Quark can weigh less than 28.5 kg.
Meanwhile, the Terrier marries two Quarks with one of the company’s Davidsix-phaseinverters.
These supply three phases to each Quark, reducing weight, size and number of components. Given the Quark’s power and torque at reasonable revs, only small low-ratio planetary gearsets are needed at each output.

ONLINE PARTNERS
