















Model for predicting battery RUL
(Image: Chang’an University)
A new way to model the lifetime of batteries has been developed by researchers in China, writes Nick Flaherty.
Accurate prediction of the remaining useful life (RUL) of a battery – as in the number of cycles left before this failure point – is essential for proactive battery management, preventing unexpected failures, optimising replacement schedules, and reducing costs and safety risks in real-world applications.
More precise RUL estimates enable better state-of-health monitoring in EVs, extending operational range confidence and preventing abrupt failures that could compromise safety.
Traditional RUL prediction methods fall into three categories: physics-based models that simulate internal degradation processes, data-driven approaches that learn patterns from historical data and hybrid fusions that combine their strengths.
While physics-based models offer interpretability, they demand extensive prior knowledge and struggle with complex non-linear dynamics. Pure data-driven techniques, such as convolutional neural networks (CNNs) for feature extraction or gated recurrent units (GRUs) for time-series forecasting, can provide highly accurate predictions when ample high-quality data are available, but can accumulate errors over long timeframes and lack robustness to noise or limited samples. Hybrid methods address these issues by integrating probabilistic state estimation such as particle filters (PFs) to correct predictions and enhance stability.
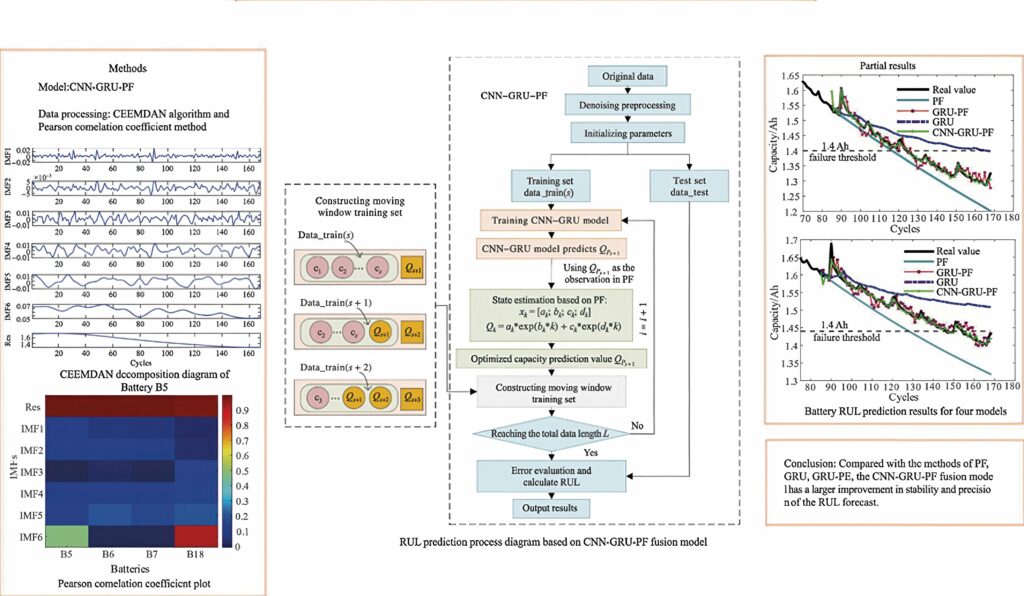
The team at Chang’an University in Xi’an, China, used all three techniques in a hybrid framework to overcome these limitations. The CNN-GRU-PF fusion model begins by preprocessing battery capacity data using complete ensemble empirical mode decomposition with adaptive noise combined with Pearson correlation analysis, thereby effectively decomposing the series into components, reconstructing them to suppress noise and preserving essential degradation trends.
A 1D CNN then extracts high-dimensional spatial features from the processed capacity sequences, while the GRU captures long-term temporal dependencies to generate initial capacity predictions. These predictions serve as observations for the PF, which leverages its strong state estimation capabilities to correct errors and produce optimised outputs. A moving window mechanism iteratively updates the training set by incorporating PF-refined values back into the CNN–GRU model, which enables dynamic adaptation and significantly boosts long-term forecasting performance.
The model, tested on datasets from NASA, showed improvements in prediction accuracy of 87.27% over a standalone GRU, 82.88% over a PF alone, and 55.43% over the simpler GRU–PF combination, and similar gains appeared across other batteries, with enhanced stability even when trained on limited data samples.
Click here to read the latest issue of E-Mobility Engineering.
ONLINE PARTNERS

